
A large-scale dataset for indoor visual localization with high-precision ground truth
Published:
Abstract
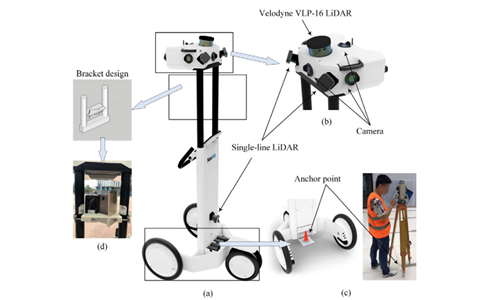
This article presents a challenging new dataset for indoor localization research. We have recorded the whole internal structure of Fengtai Wanda Plaza which is an area of over 15,800 m2 with a Navvis M6 device. The dataset contains 679 RGB-D panoramas and 2,664 query images collected by three different smartphones. In addition to the data, an aligned 3D point cloud is produced after the elimination of moving objects based on the building floorplan. Furthermore, a method is provided to generate corresponding high-resolution depth images for each panorama. By fixing the smartphones on the device using a specially designed bracket, six-degree-of-freedom camera poses can be calculated precisely. We believe it can give a new benchmark for indoor visual localization.
Reference
Yuchen Liu, Wei Gao*, Zhanyi Hu. A large-scale dataset for indoor visual localization with high-precision ground truth. The International Journal of Robotics Research, 41(2), pp. 129-135, 2022. DOI