SRIF: A Safer Ranking Inference Framework for Diffusion Policy Models without Retraining
Published:
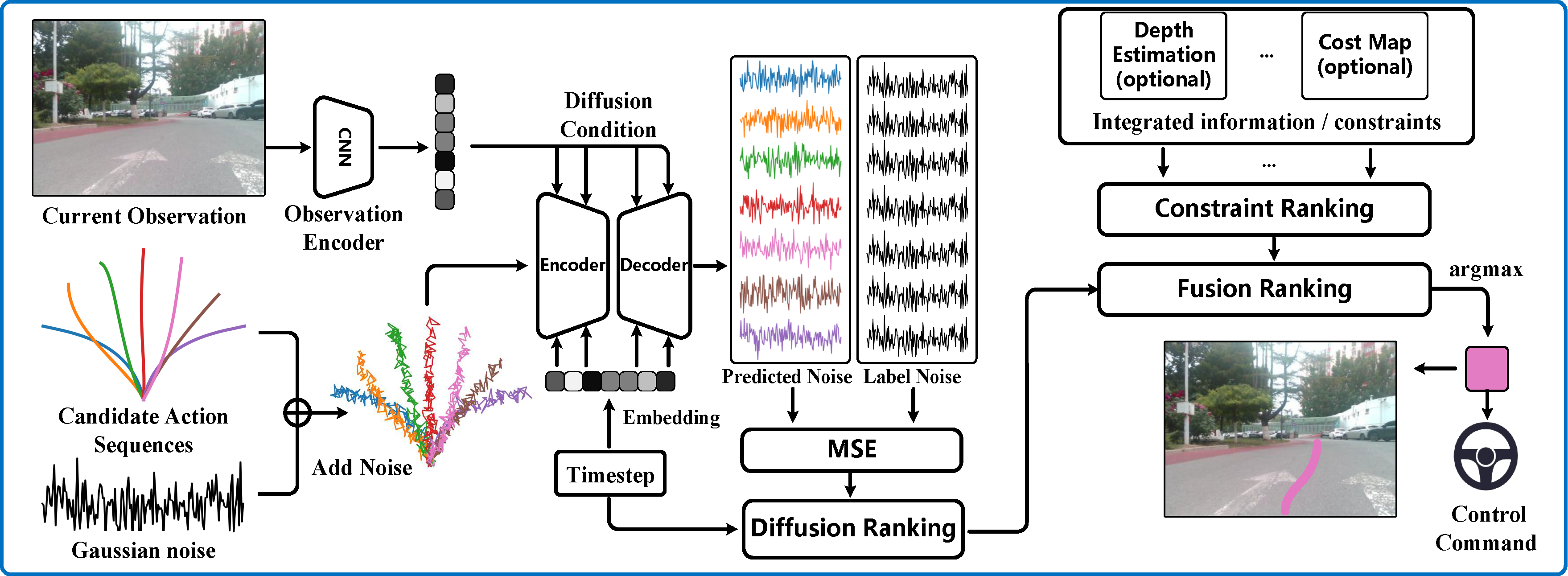
Recently, diffusion policy models have been applied in the field of robotics. Most existing methods use all observations as condition inputs to the diffusion model. With the denoising of the diffusion model, Gaussian noise gradually becomes an action sequence. However, since these constraints are implicitly entered into the diffusion model [Read More]