Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
Contact me
This is a page not in th emain menu
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
The datasets have two parts, one part consists of laser scan data and corresponding image data which used to compare the accuracy and completeness with the different reconstruction methods, the other consists of the image collections of the typical ancient architectures in the four Buddhist mountains (Mount Wutai, Mount Emei, Mount Jiuhua, Mount Puto) and two Taoist mountains (Mount Wudang, Mount Qingcheng) 
Published:
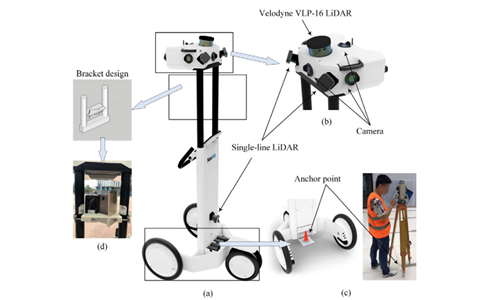
We present a challenging new dataset for indoor localization research. We have recorded the whole internal structure of Fengtai Wanda Plaza which is over 15800 square meters area with a Navvis M6 device. The dataset contains 679 RGBD panoramas and 2664 query images collected by three different smartphones. In addition to the data, aligned 3D point cloud is produced after the elimination of moving objects based on the building floorplan. Furthermore, a method is provided to generate corresponding high resolution depth images for each panorama. By fixing the smartphones on the device using a specially designed bracket, 6 degree of freedom camera poses can be calculated precisely. We believe it can give a new benchmark for indoor visual localization. 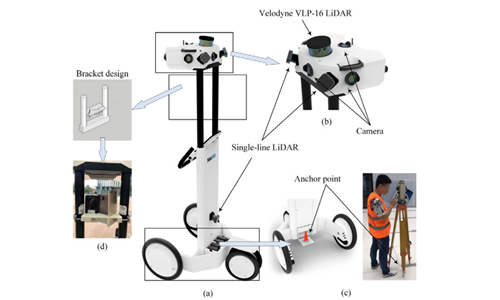
Short description of portfolio item number 1
Short description of portfolio item number 2
Published in Journal 1, 2009
This paper is about the number 1. The number 2 is left for future work.
Recommended citation: Your Name, You. (2009). "Paper Title Number 1." Journal 1. 1(1). http://academicpages.github.io/files/paper1.pdf
Published in Journal 1, 2010
This paper is about the number 2. The number 3 is left for future work.
Recommended citation: Your Name, You. (2010). "Paper Title Number 2." Journal 1. 1(2). http://academicpages.github.io/files/paper2.pdf
Published in Journal 1, 2015
This paper is about the number 3. The number 4 is left for future work.
Recommended citation: Your Name, You. (2015). "Paper Title Number 3." Journal 1. 1(3). http://academicpages.github.io/files/paper3.pdf
Published:
Combining camera, IMU and wheel encoder is a wise choice for car positioning because of the low cost and complementarity of the sensors. We propose a novel extended visual-inertial odometry algorithm tightly fusing data from the above three sensors. Firstly we propose an IMU-odometer pre-integration approach [Read More]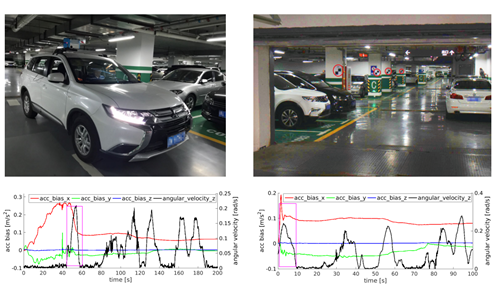
Published:
Visual localization is a fundamental problem in computer vision and robotics. Recently, deep learning has shown to be effective for robust monocular localization. Most deep learning-based methods utilize convolution neural network (CNN) to regress global 6 degree-of-freedom (Dof) pose. However, these methods suffer from [Read More]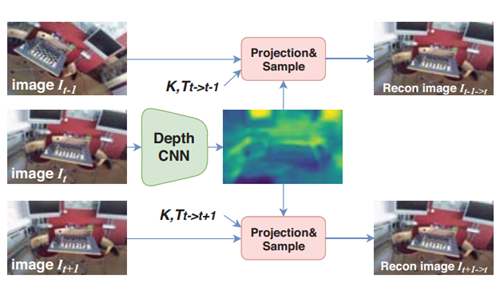
Published:
In this paper, we present a deep learning-based approach to monocular visual odometry. We propose a LCGR(Local Convolution and Global RNN) module which utilizes several independent 3D convolution layers to filter noise from features extracted by FlowNet, as well as to model local information, and a Bi-ConvLSTM layer to [Read More]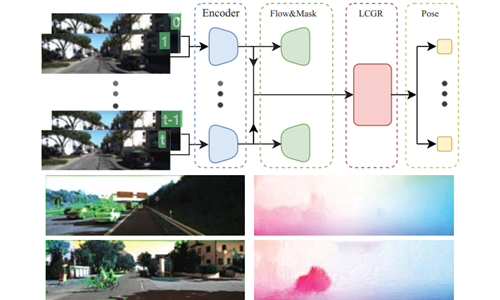
Published:
Visual localization is a key technology in the field of 3D robot vision. One of its major difficulties lies in how to deal with the challenges brought by the appearance changes of query images and database images caused by large time spans. Many methods focus on extracting more robust features from images to deal with [Read More]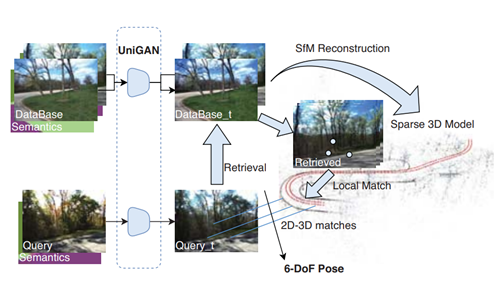
Published:
Odometer-aided visual-inertial SLAM systems typically have a good performance for navigation of wheeled platforms, while they usually suffer from degenerate cases before the first turning. In this paper, firstly we perform an observability analysis w.r.t. the extrinsic parameters before the first turning, which is a [Read More]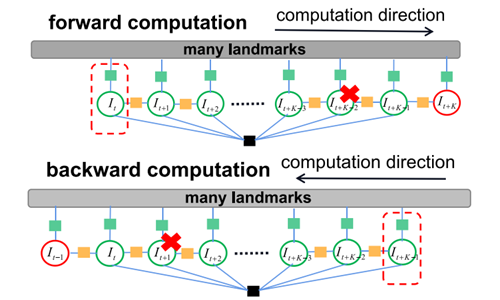
Published:
Unlike loose coupling approaches and the EKF-based approaches in the literature, we propose an optimization-based visual-inertial SLAM tightly coupled with raw Global Navigation Satellite System (GNSS) measurements, a first attempt of this kind in the literature to our knowledge. More specifically, reprojection error, [Read More]
Published:
Robust visual localization in traffic scenes is a fundamental problem for self-driving vehicles. However, it is still challenging to achieve accurate localization performance because of drastic viewpoint and illumination changes. To address the issues, we design a novel monocular localization framework based on a [Read More]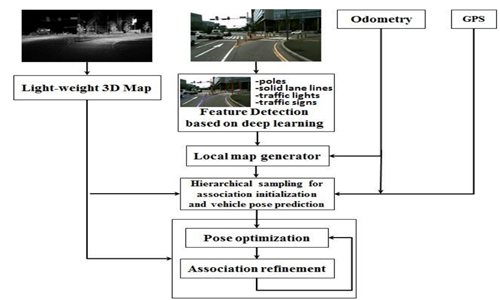
Published:
This article presents a challenging new dataset for indoor localization research. We have recorded the whole internal structure of Fengtai Wanda Plaza which is an area of over 15,800 m2 with a Navvis M6 device. The dataset contains 679 RGB-D panoramas and 2,664 query images collected by three different smartphones. [Read More]
Published:
By demonstrating robustness in scenarios characterized by high-speed motion and extreme lighting changes, event cameras hold great potential for enhancing the perception reliability of autonomous driving systems. Since its novelty and data sparsity, the progress of event-based algorithms is hindered by the scarcity of high-quality labeled [Read More] 
Published:
Combining camera, IMU and wheel encoder is a wise choice for car positioning because of the low cost and complementarity of the sensors. We propose a novel extended visual-inertial odometry algorithm based on sliding window tightly fusing data from the above three sensors. Firstly we propose an IMU-odometer pre-integration approach utilizing complete IMU [Read More] 
Published:
Real‐world robots will face a wide variety of complex environments when performing navigation or exploration tasks, especially in situations where the robots have never seen before. Usually, robots need to establish local or global maps and then use path planning algorithms to determine their routes. However, in some environments [Read More] 
Published:
Monocular image-goal navigation in an outdoor environment is a challenging task. Robots have to face monocular scale uncertainty and complex environments. Recently, implementations based on imitation learning have made significant progress. However, robots tend to focus too much on the current state and ignore the image goal [Read More] 
Published:
The application of diffusion models into the field of robotics is gaining increasing attention due to its advantages in modeling complex data distributions. In the visual navigation task of mobile robots based on diffusion policy, existing frameworks use the current observation as the guidance condition and adopt a classifier free guidance mode for joint training. [Read More] 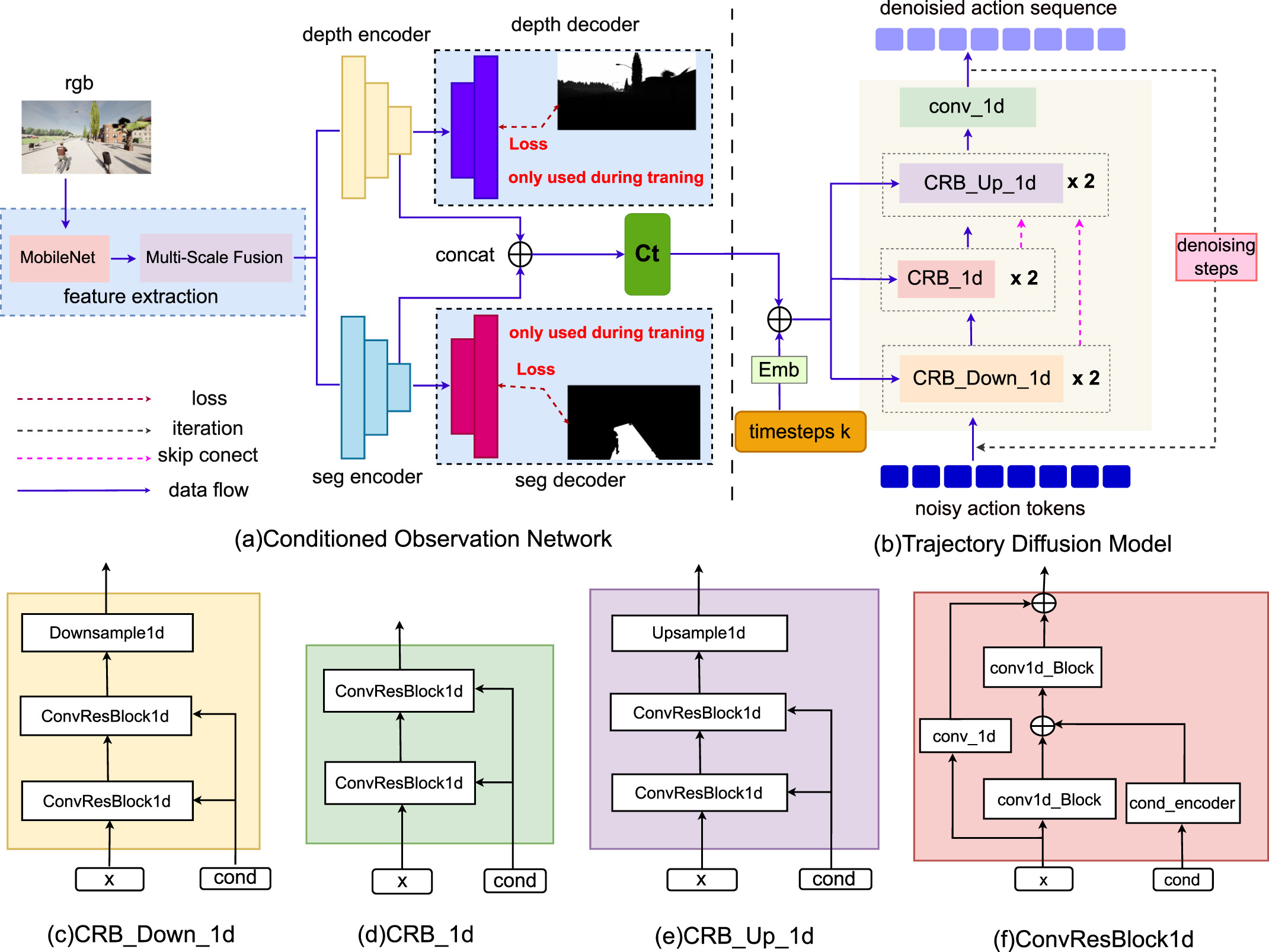
Published:
Recently, diffusion policy models have been applied in the field of robotics. Most existing methods use all observations as condition inputs to the diffusion model. With the denoising of the diffusion model, Gaussian noise gradually becomes an action sequence. However, since these constraints are implicitly entered into the diffusion model [Read More] 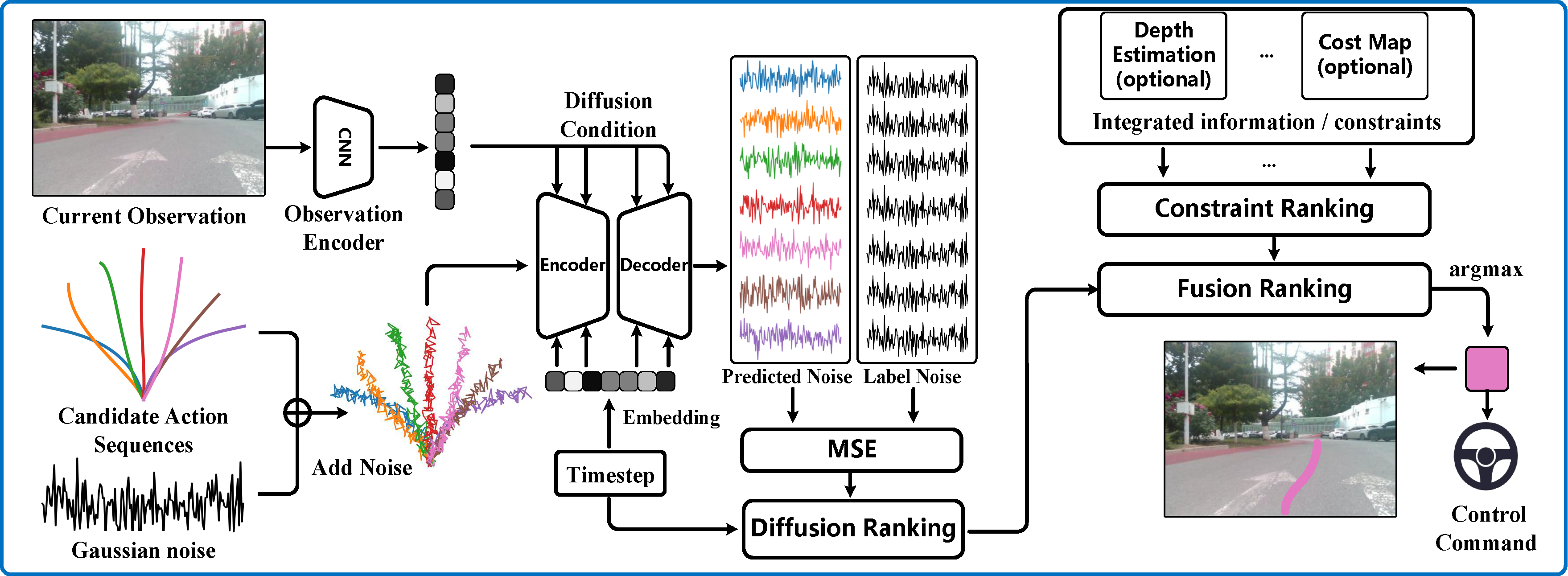
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.